




康耐德設(shè)備測(cè)試視頻
解決方案")
項(xiàng)目背景
傳送鏈用于驅(qū)動(dòng)傳送帶。這些鏈條承受不同的負(fù)載(約 15 噸)和速度(每分鐘 65 英尺),這可能會(huì)導(dǎo)致它們出現(xiàn)裂縫。為了使其有效工作,鏈條需要沒(méi)有裂縫。 鏈條上的任何裂紋都將導(dǎo)致鏈節(jié)斷裂并最終停止制造操作。
項(xiàng)目需求
沒(méi)有適當(dāng)?shù)臋C(jī)制來(lái)識(shí)別移動(dòng)輸送機(jī)上的裂縫,鏈條的檢查完全是手動(dòng)的,并且只有在它們靜止時(shí)才能進(jìn)行。一旦發(fā)現(xiàn)裂縫,操作員就會(huì)更換鏈條。盡早識(shí)別鏈條上的裂縫,以減少停機(jī)時(shí)間并獲得高產(chǎn)量。
解決方案
使用基于 AI 的視覺(jué)系統(tǒng)對(duì)金屬鏈進(jìn)行光學(xué)檢測(cè)視覺(jué)系統(tǒng)和人工智能如何解決這個(gè)問(wèn)題?解決方案的開(kāi)發(fā)包括 4 個(gè)重要部分,即圖像采集、機(jī)器學(xué)習(xí)、解決方案部署和精度改進(jìn)。
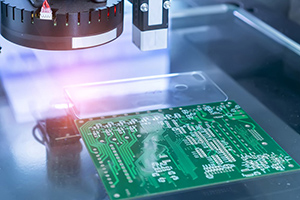
1、圖像采集裝置包括一個(gè)帶紅線燈的攝像頭,以最小的反射照亮鏈條的表面。該設(shè)置有助于數(shù)據(jù)收集,即獲取鏈接/鏈的圖像。
2、機(jī)器學(xué)習(xí)部分出現(xiàn)在數(shù)據(jù)收集之后。它也被稱為數(shù)據(jù)注釋,其中圖像用于在注釋(邊界框)的幫助下訓(xùn)練基于AI的模型。
3、將經(jīng)過(guò)訓(xùn)練的模型部署在現(xiàn)場(chǎng)生產(chǎn)線上,以實(shí)時(shí)檢查是否存在裂縫。
4、在理想情況下,并非所有缺陷(裂縫)每次看起來(lái)都相同,可能存在一些未經(jīng)預(yù)訓(xùn)練的缺陷。因此,需要通過(guò)重新訓(xùn)練模型來(lái)提高準(zhǔn)確性,直到所有變化都被訓(xùn)練以確保不會(huì)遺漏前所未有的裂縫。

康耐德設(shè)備測(cè)試視頻
康耐德設(shè)備測(cè)試視頻

康耐德智能年會(huì)視頻
 官方公眾號(hào)
官方公眾號(hào) 官方抖音號(hào)
官方抖音號(hào)Copyright ? 2022 東莞康耐德智能控制有限公司版權(quán)所有.機(jī)器視覺(jué)系統(tǒng) 粵ICP備2022020204號(hào)-1 聯(lián)系我們 | 網(wǎng)站地圖